|
基于足底壓力測量技術(shù)的人體運(yùn)動意圖判定方法研究
OUTLINE
* Background
* System introduction
* Calculation
* Results
* Conclusion
BACKGROUND
* 平衡功能——處于某種姿勢或穩(wěn)定狀態(tài)下,當(dāng)運(yùn)動或受到外力作用時(shí),人體自動調(diào)整并維持姿勢的能力
* 足底壓力的變化反應(yīng)了人體姿勢變化
* 足部結(jié)構(gòu)發(fā)生病變或者解剖特征發(fā)生變化時(shí),人體的平衡功能將受到顯著的影響,足底壓力就會發(fā)生相應(yīng)的變化
BACKGROUND
BACKGROUND
BACKGROUND
* 集總力和分布力
• 集總力:六維傳感器( 𝑀𝑍、 𝑀𝑦、 𝑀𝑥、 𝐹𝑧、 𝐹𝑦、 𝐹𝑥)
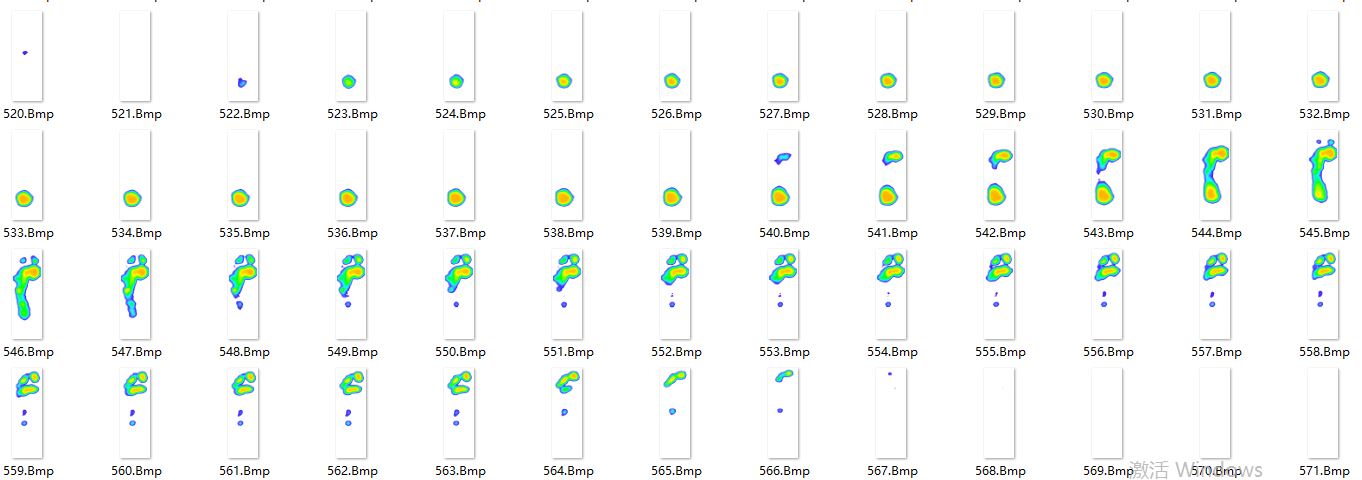
• 分布力:壓力墊(鋪有60×21的帶狀導(dǎo)體的薄膜)
SYSTEM INTRODUCTION
SYSTEM INTRODUCTION
SYSTEM INTRODUCTION
SYSTEM INTRODUCTION
CALCULATION
* 足底壓力中心(COP)的計(jì)算
• 利用集總力數(shù)據(jù)計(jì)算COP
• 𝐶𝑂𝑃_𝑋1= 𝑀𝑦 𝐹𝑧
• 𝐶𝑂𝑃_𝑌1= 𝑀𝑋 𝐹𝑍
– D. Lafond, M. Duarte, F. Prince. Comparison of three methods to estimate the center of mass during balance assessment [J]. Journal of Biomechanics 2004, 37: 1421–1426
• 利用分布力數(shù)據(jù)計(jì)算COP
• 𝐶𝑂𝑃_𝑋2= 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖∗ 𝑥𝑖𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖
• 𝐶𝑂𝑃_𝑌2= 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖∗ 𝑦𝑖𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖
– Tai Ryoon Han, Nam Jong Paik, Min Sik Im. Quantification of the path of center of pressure (COP) using an F-scan in-shoe transducer [J]. Gait and Posture 1999, 10: 248–254.
CALCULATION
* 壓力墊與測力臺系統(tǒng)COP估計(jì)一致性評估
RESULT
* 壓力墊與測力臺系統(tǒng)COP估計(jì)一致性評估
CONCLUSION
* 利用壓力墊分布力的計(jì)算結(jié)果與利用測力臺集總力的計(jì)算結(jié)果具有較高的一致性和相關(guān)性
* 壓力墊分布力亦可以準(zhǔn)確地反映出人體足底壓力中心的偏移情況,從而為穿戴式人體平衡狀態(tài)評估和判斷運(yùn)動意圖提供十分有力的支持
* 這種可穿戴式的測量為動態(tài)平衡功能評定及助力行走外骨骼機(jī)器人的運(yùn)動規(guī)劃及控制提供了一種有效的測量手段
人體坐壓測量系統(tǒng)
|