精品无码三级在线观看视频_日韩欧美在线精品一区二区_日韩欧美国产成人_日本精品国产乱码久久久久的蜜桃_欧美成人精品三级网站
設(shè)為主頁
加入收藏
繁體中文
網(wǎng)站首頁
公司簡介
產(chǎn)品展示
薄膜壓力分布測試系統(tǒng)
薄膜壓力傳感器系統(tǒng)
壓力發(fā)電膜
薄膜彎曲傳感器
電容式薄膜壓力傳感器
薄膜電位計
磁力傳感器
薄膜溫度傳感器
產(chǎn)業(yè)動態(tài)
公司新聞
行業(yè)新聞
產(chǎn)品新聞
客戶留言
企業(yè)展播
訂單流程
誠聘精英
聯(lián)系我們
運動測量系統(tǒng)
薄膜壓力分布測試系統(tǒng)
壓力分布量測系統(tǒng)
簡易型壓力分布量測系統(tǒng)
便攜式壓力量測系統(tǒng)
人體壓力分佈量測系統(tǒng)
足部壓力分布量測系統(tǒng)
握力壓力分布量測系統(tǒng)
輪胎壓力分布量測系統(tǒng)
雨刷力量分布量測系統(tǒng)
壓力分布測試系統(tǒng)標(biāo)定
薄膜壓力傳感器系統(tǒng)
彎曲傳感器
薄膜壓力傳感器
力學(xué)試驗機
MEMs壓力傳感器
壓力測量系統(tǒng)
步態(tài)分析系統(tǒng)
表面肌電測試系統(tǒng)
運動捕捉系統(tǒng)
運動測量系統(tǒng)
多通道電生理系統(tǒng)
壓力分布測量系統(tǒng)
無線傳感器測試系統(tǒng)
壓力發(fā)電膜
薄膜彎曲傳感器
電容式薄膜壓力傳感器
薄膜電位計
磁力傳感器
薄膜溫度傳感器
溫度傳感器采集卡
薄膜鉑電阻溫度傳感器
柔性NTC溫度傳感器
氣體傳感器
>蘇州長顯光電科技有限公司
>地址:江蘇省常熟市常熟沿江經(jīng)濟開發(fā)區(qū)四海路11號常熟科創(chuàng)園407
>郵編:215500
>聯(lián)系人:蔡小姐
>電話:0512-51910068
>傳真:
>E-mail:18018176686@189.cn
>> 網(wǎng)址:
www.m.mentressmoon.com
你的位置:
首頁
>>
產(chǎn)品展示
>>
薄膜壓力傳感器系統(tǒng)
>>
運動測量系統(tǒng)
運動測量系統(tǒng)
基本CNN算法及典型觸覺行為實驗系統(tǒng)
來源:薄膜壓力傳感器壓力分布 | 發(fā)布時間:2020/2/21 15:12:28 | 瀏覽次數(shù):
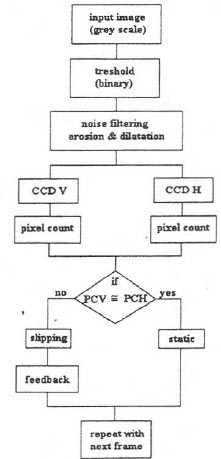
基本CNN算法及典型觸覺行為實驗系統(tǒng) 摘要 摘要-作為在硅上建立自適應(yīng)觸覺系統(tǒng)的第一步,我們利用阿拉丁親細(xì)胞視覺微控制器開發(fā)系統(tǒng),建立了一個具有市場上可用的壓力傳感器陣列觸覺和類似CNN算法的實驗系統(tǒng)。利用該系統(tǒng),我們可以測量和存儲觸覺作用下壓力場地形流的一些典型快照,并對這些快照進行評價。一組類似的CNN算法。 一。導(dǎo)言 在信息技術(shù)的感官革命中,我們所經(jīng)歷的時代,新的感知元素?zé)o處不在。感官輸出值是連續(xù)的,在時間上可以是離散的或連續(xù)的。 在生活結(jié)構(gòu)中,傳感和“處理”部分緊密耦合,提供“智能傳感”。我們打算建立一個原型系統(tǒng),其中感官陣列輸出由CNN-UM(細(xì)胞神經(jīng)網(wǎng)絡(luò)-通用機器)處理器處理[1-2]。CNN范式被成功地用于脊椎動物視覺系統(tǒng)的建模,特別是視網(wǎng)膜的建模(3-4)。到目前為止,這些類型的傳感器處理器結(jié)構(gòu)已經(jīng)在光學(xué)傳感器的情況下進行了研究,但在本實驗中,我們打算使用壓力傳感器與CNN-UM。壓力傳感最常用的方法是電容式[5-6]、電阻式[7]和壓電式[8]壓力傳感器。 盡管壓力傳感器陣列的不同實現(xiàn)方式的結(jié)果已經(jīng)發(fā)布,但其中很少作為產(chǎn)品提供。我們選擇了Tactilus?[9]建立一個簡單的實驗系統(tǒng)。觸覺感知的過程是動態(tài)的,感覺陣列必須在空間中移動才能被感知。對于動態(tài)感知,處理系統(tǒng)必須處理相對大量的數(shù)據(jù)(觸覺幀/秒)。 在這篇文章中,我們想記錄一些典型觸覺動作中壓力場的快照,并通過CNN-UM對其進行預(yù)處理。 第一個實驗是確定一個類似的算法,用于控制一只兩只手指的機器人手握住一個易碎的物體,如玻璃或瓶子。目標(biāo)是確定最小抓取力。系統(tǒng)對壓力場的變化進行處理,感知物體從機器人手上滑出的時刻。根據(jù)這些信息,我們可以為抓取者提供更好的反饋。 第二個實驗是確定給定swface的屬性,如形狀和大小,并在其上找到凹凸、孔洞和不同的紋理。 第二節(jié)介紹了實驗系統(tǒng)。第三節(jié)對一些觸覺過程進行了分析,在實驗的基礎(chǔ)上,第四節(jié)給出了一些結(jié)論。 2。觸覺傳感實驗系統(tǒng) 這個實驗系統(tǒng)由三個主要部分組成,如圖1所示。 信號處理系統(tǒng)的主要部分是阿拉丁Pro[10]。該單元處理觸覺圖像流。在檢測傳感器陣列的某些運動過程中,特別是在檢測物體從手指滑落的現(xiàn)象時,我們需要處理單元的快速響應(yīng),這是CNN·UM很好地完成的。當(dāng)需要識別物體的大小、形狀和紋理時,就需要類似的算法。 傳感器陣列是Tactilus®觸覺系統(tǒng),通過USB端口連接到PC。 PC機僅用于顯示事件,并在傳感器部分和阿拉丁Pro之間建立連接。 圖1:實驗觸覺系統(tǒng) 壓力感應(yīng)槽觸覺器 Tactilus®是一種電子觸覺力和壓力指示傳感器。我們之所以使用電容式壓力傳感器,是因為它們的壓力靈敏度更高,并且比另外兩種最常見的方法電阻式和壓電式壓力傳感器更能抵抗工作溫度的變化。傳感器具有線性響應(yīng)和低滯后。隨著時間的推移,性能降低的可能性較小。 Tactilus®允許在事件發(fā)生時實時監(jiān)控力在任何兩個接觸或配合表面之間的分散情況。壓力場的可視化可以是:20、3D或直方圖,結(jié)果也可以旋轉(zhuǎn)。該系統(tǒng)包括一個50毫米x 50毫米的掌上傳感器,空間分辨率為2.5毫米(21x 2 1個tuxels)和五個手指傳感器,每個傳感器為1.3毫米x 13毫米,空間分辨率為1.5毫米(9x9個tuxels)。一個luxel是傳感器陣列中的一個傳感器點。該系統(tǒng)的查詢速率可達(dá)60000個傳感器點/秒。傳感器襯墊的最佳壓力范圍為0-1 atm,精度為±10%。 陣列的空間分布(例如安裝在手套上)使得其結(jié)構(gòu)類似于人類陣列的空間分布(例如,安裝在手套上)使得類似于人手的配置成為可能,這使得我們能夠研究軀體感覺的最重要形式,辨別性觸摸(需要識別物體的大小、形狀和紋理以及它們在皮膚表面的運動)[II]。 Aladdin-Pro系統(tǒng)為開發(fā)類似的CNN算法提供了一個通用框架。這些算法可以在軟件模擬器或64*64 CNN-UM模擬VLSI芯片上運行[12]。ACE4k是一個包含CNN-UM芯片的平臺,內(nèi)置于PC I 04型板中。平臺通過PCI總線接口連接到主機,為64*64 CNN-UM提供快速上下加載數(shù)據(jù)的能力。 三。幾種典型觸覺行為分析 溫和的抓取 當(dāng)抓取玻璃或瓶子等易碎物品時,必須了解何時接觸,并盡量減小抓取力。觸覺傳感器可以為這項任務(wù)提供比通過視覺或力覺獲得的更好的感官信息。該算法是檢測用兩只手指的機器人手握住物體所需的最小力。 圖2:檢測壓力圖之間差異的算法流程圖 該算法持續(xù)跟蹤接觸區(qū)域的壓力,并檢測物體何時從手指中滑出。當(dāng)物體被很好地抓住時和當(dāng)它滑落時,壓力圖的thc形狀之間的差異被有問題的算法識別出來。此差異表示所持對象開始滑動的時刻。同時還計算了事件的方向和速度。 此信息用于向抓取器提供適當(dāng)?shù)姆答仭Mǔ#撓到y(tǒng)只能完成力和位置傳感器難以完成的任務(wù)。 只有一個壓力傳感器(感應(yīng)每個手指上的正常壓力)無法完成Tbis任務(wù)。但是通過傳感器陣列我們可以跟蹤壓力場的變化。這有助于我們更好地了解被抓物體的實際情況。 在圖2中給出了算法的流程圖。第一步是用閾值模板得到壓力圖的形狀。利用腐蝕和膨脹形態(tài)學(xué)運算從噪聲中濾除二值圖像。地圖的寬度和高度是通過應(yīng)用一個水平CCO模板來測量的,該模板通過計算輸出圖像的像素和垂直方向的相同方式來測量。 圖3:壓力圖:a)靜壓,b)閾值 圖4:壓力圖:a)動態(tài)滑動圖的快照,b)及其閾值形狀 所有模板都可以從美國有線電視新聞網(wǎng)阿拉丁專業(yè)系統(tǒng)軟件庫。 利用壓力圖進行表面重建 當(dāng)我們想要獲得一些關(guān)于物體的紋理和形狀的信息時,觸覺信息的重要性是顯而易見的。 當(dāng)外科醫(yī)生不能直接接觸到病變部位而需要使用特殊的設(shè)備時,紋理傳感識別是遠(yuǎn)程手術(shù)和微創(chuàng)手術(shù)的重要需求。 另一個不同的,但同樣重要的任務(wù)是機器人在非結(jié)構(gòu)化和不斷變化的環(huán)境中識別物體形狀的能力,特別是在視覺感知不夠的情況下(在黑暗中,煙霧等)。 由于觸覺感知的神經(jīng)生理學(xué),當(dāng)我們將尖端移過物體表面時,我們能比靜態(tài)觸摸更好地感知紋理。其主要原因是我們尖端的機械感受器適應(yīng)了靜態(tài)刺激。 這個實驗是為了確定一個給定的表面的性質(zhì),例如形狀和大小,并在上面找到凸起、洞和不同的紋理。 傳感器陣列安裝在一個在20內(nèi)移動的執(zhí)行器上。對于每個觸覺框架,系統(tǒng)都知道感官陣列的X-Y坐標(biāo)。圖像是交錯的,經(jīng)過預(yù)處理后,它們形成最終的表面圖像。 圖5:拐角處的壓力圖 圖6:重建過程 該算法加入了壓力圖給出的角點。物體的表面是通過填充角和邊之間的空間來獲得的。 圖7:曲面重建算法 這種自傳的CNN算法可以幫助理解盲人如何在他們的想象中重建環(huán)境。 四。結(jié)論 利用Xsensor系統(tǒng)和Aladdin Pro,結(jié)合64x64 CNN-UM芯片,建立了一個自適應(yīng)觸覺傳感過程的實驗系統(tǒng)。開發(fā)并測試了類似的CNN算法。壓力傳感過程的時間要求高于芯片上運行的模擬CNN算法的總時間要求。傳感器陣列以16幀/秒的速度掃描。模擬式aJgoritm的平均運行時間約為21ms,機器人手的執(zhí)行器可以由ana的結(jié)果驅(qū)動觸覺感知提供了一組豐富的操作過程信息,觸覺感知研究的未探索領(lǐng)域眾多。在觸覺感知的研究中,下一步是展示視覺和觸覺之間更緊密的耦合。 致謝 該項目得到了“匈牙利國家研究與發(fā)展方案:TeleSense NKF 2001/02/035”的支持。授予OTKATS40858(匈牙利國家研究基金)。 參考文獻 五十、 O.Chua,L.Yang,“細(xì)胞神經(jīng)網(wǎng)絡(luò):理論”,《電路與系統(tǒng)的IEEE交易》,第35卷,第1257-1272頁,1988年 T、 Roska,L.O.Chua,“CNN通用機器-模擬空氣~計算機”,在IEEE Trans。論電路與系統(tǒng)Ⅱ:模擬與數(shù)字信號處理第40卷,第3期,第163-1731993頁 D、 Batya,B.Raska,T.Roska,F(xiàn).Werblin,“CNN的框架。:哺乳動物視網(wǎng)膜中的并行處理建模“《Ciroit理論與應(yīng)用國際期刊》,第30卷,第363-3932002頁 M、 布倫德爾。T、 Roska,“使用自適應(yīng)細(xì)胞神經(jīng)網(wǎng)絡(luò)的自適應(yīng)圖像傳感和增強。《通用機械》,國際Cimit理論與應(yīng)用雜志。第30卷,第287-3122002頁 壓力剖面系統(tǒng)。電容傳感,洛杉磯,2002,www.pressure-profile.com 壓力剖面系統(tǒng),TactArray。洛杉磯,2002年,www.pressure-profile.com B、 J.凱恩,M.R.卡特科斯基。G、 T.A.Kovacs,“用于高分辨率機器人觸覺成像的牽引應(yīng)力傳感器陣列”,《微型機電系統(tǒng)雜志》,第9卷,第4期,第425-434頁,2000年 印刷電路板壓電子學(xué),一般壓電理論和壓電壓力傳感器簡介,1999年 傳感器產(chǎn)品,XSENSOR實時觸覺壓力測量,東漢諾威,2002,www.xsenSOLcom 阿拉丁Pro系統(tǒng),模擬計算機,2002,www.Analogic-Computers.com E、 R.Kandel,J.H.Schwartz和T.M.Jessell:《神經(jīng)科學(xué)原理》。出版人:McGrawHill/Appleton&Lange;第四版(2000年1月5日) S、 Espejo,R.Dominguez Castro,G.Linan,A.Rodriguez Vazquez,“帶模擬和數(shù)字110的64x64 CNN通用芯片”,第五屆IEEE電子、電路和系統(tǒng)國際會議論文集(lCECS'98)。第203-206頁,里斯本,1998年 M-H.Bao,“微型機械傳感器、壓力傳感器、加速計和陀螺儀”,《傳感器和執(zhí)行器手冊》第8卷,Elsevier Science B.V.,2000年 K、 Suzuki,K.Najafi,K.D.Wise,“1024元件高性能硅觸覺成像儀”,《電子器件的IEEE交易》,第37卷,第8期,第1852-1860頁,1990年 G、 T.A.Kovacs:微機械傳感器Sourceboak,McGraw-Hill,1998年 K、 S.J.Pister,“微機電系統(tǒng)設(shè)計與制造簡介”,伯克利大學(xué)傳感器與執(zhí)行器中心,伯克利分校,2002年 W、 P.Eaton,J.H.Smith,D.J.Monk,G.O'Brien和T.F.Miller,“塊狀表面微機械壓力傳感器的比較”,微機械設(shè)備和部件,Proc SPlE,Vo13514,P.4311998
TAG:
打印本頁
||
關(guān)閉窗口
上一篇:
消防員背教項目的成本效益
下一篇:
選擇步態(tài)分析系統(tǒng)時要考慮的7件事
聯(lián)系電話:0512-51910068 傳真:
蘇ICP備2022001945號
版權(quán)所有:蘇州長顯光電科技有限公司 聯(lián)系地址:江蘇省常熟市常熟沿江經(jīng)濟開發(fā)區(qū)四海路11號常熟科創(chuàng)園407 長顯科技致力于最新產(chǎn)品薄膜壓力傳感器,光學(xué)測量,激光應(yīng)用,力學(xué)測量,人工智能, 產(chǎn)品有 tekscan壓力分布測試系統(tǒng),SPI Tactilus壓力分布測量系統(tǒng),Qualisys運動捕捉系統(tǒng),CleanLaser激光清洗系統(tǒng),NIEO LCD多軸光學(xué)測量系統(tǒng),J&C LED積分球,F(xiàn)aro三維掃描儀